According to official news from Haptron Scientific, a subsidiary of Bright (BLT), the advanced metal 3D printing-based hand joint force perception solution from Haptron Scientific was unveiled at the Bright (BLT) booth during the 2025 Shanghai TCT Asia exhibition.
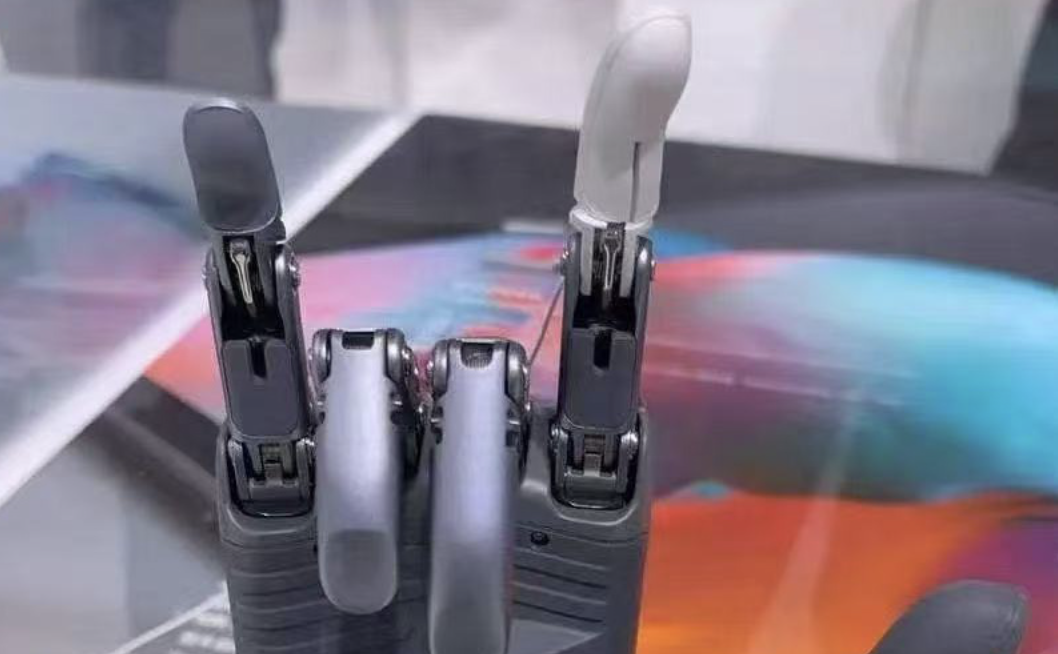
The humanoid robot’s dexterous hand displayed at the Bright (BLT) booth integrates Haptron Scientific’s Photon Finger, a fingertip multi-dimensional force sensor, and the PhotonR40, a wrist joint six-dimensional force sensor. This is the world’s first series of optical-based six-dimensional force sensors made using metal 3D printing technology, marking the first time that metal 3D printing has been applied to the manufacturing of optical-based six-dimensional force sensors.

Thanks to the advanced manufacturing technology provided by Bright (BLT), the leader in metal 3D printing, this sensor series has achieved breakthroughs in core performance, production scale, and manufacturing efficiency. The Photon Finger, the fingertip multi-dimensional force sensor displayed at the exhibition, is currently the world’s smallest multi-dimensional force sensor developed by Haptron Scientific for humanoid robots.
With a diameter of only 8.5mm and a thickness of 7mm, this sensor sets a new industry standard for micro sensors. Its ultra-miniaturized design has been successfully integrated into the fingertips of humanoid robots, solving the long-standing problem of fingertip force perception loss in humanoid robots.
Leave a Reply